Imagine an automated end-of-line case-packing operation so nimble and easy to change that it handles up to 16 different packaging formats and moves from one format to another with little more operator involvement than the push of a button. Now imagine it operating at speeds to 140 glass bottles/min. And what if it did all this so deftly that the super-premium labels and secondary and tertiary paper-based packaging materials that it’s handling are never scuffed, scratched, dented, or marred in any way?
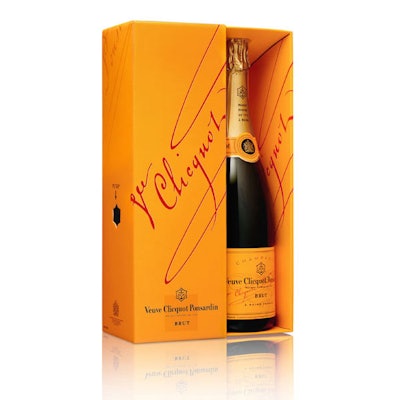
The packaging professionals at Veuve Clicquot Ponsard (VCP) imagined just such a line about a year ago and then proceeded to specify and install it. A leading champagne producer based in Reims, France, VCP’s ambitious and visionary end-of-line solution was provided by Cermex. Without a strong partnership between the two firms, the sophisticated cartoning and casing operation could never have come to fruition. Now in production since July, the line handles unboxed bottles as well as bottles in a gift box that VCP calls the Design Box.
As with most lines of such complexity, it helps to view a diagram of what machines go where (see Figure A). It also helps to walk through the line in both of its modes: first when it’s putting bottles into trays and trays into cases, and second when it’s putting bottles into Design Boxes and Design Boxes into cases. Both formats are required because about half of VCP’s global sales consists of bare bottles on shelves while the other half consists of bottles in Design Boxes.
The beginning of the Cermex-supplied solution is a pair of F27240 tray erectors. The two lanes of trays merge into a single lane, and as they do, a photocell inspection station kicks out trays that are incorrectly glued or otherwise misshapen.
Shown in Figure B is one of two corrugated tray formats that these tray erectors are capable of handling. This format holds three bottles, and two three-count trays are stacked inside a wraparound corrugated case. Another format is a corrugated tray holding six bottles with two trays stacked inside a wraparound case.
The machine responsible for putting the bottles into trays is the Cermex AN110 gantry packer. Bottles are fed into this machine in two parallel lanes. Down the center of these two lanes is a single infeed lane carrying freshly erected corrugated trays. The AN110 constantly picks from one bottle infeed lane and then the opposite bottle infeed lane. The robotic end effectors not only mechanically grip and lift the bottles (12 at a time are being lifted in Figure C). They also tip the bottles from a vertical to a horizontal orientation. Moreover, the 12 bottles are tipped in such a way that when they are placed in the four corrugated trays, they are perfectly oriented in the top-to-tail format visible in Figure B.
Once the gantry packer has loaded bottles into trays, the corrugated trays are advanced a short distance to the Cermex WB4580 wraparound case packer. Rather than pushing the trays forward and thus risking the chance of scuffing or even denting of the corrugated material, this transfer takes place on what Cermex calls a “step-by-step bracket conveyor.” It’s a servo-driven flighted conveyor that moves in an oval-shaped path the way treads on a military tank move. It delivers trays smoothly and reliably from the gantry robot to the case packer immediately downstream.
The WB4580 wraparound case packer has two Fanuc M710-50kg robots integrated into it. It’s these robots that pick trayed bottles and place them into wraparound cases that the WB4580 erects from flat blanks.
The synchronization of the two Fanuc robots is impressive, to say the least, especially when they’re operating at up to 25 cases/min. Filled cases have their flaps folded and glued and are then discharged from the case packer.
Handling Design Boxes
So much for putting trayed bottles into corrugated cases. When bottles in stylish Design Boxes rather than unadorned trays are being case packed, the sequence of operations is slightly different.
Placement of bottles into Design Boxes is done upstream from the Cermex machines on a highly customized system supplied by ITCM (see sidebar). The filled Design Box is then conveyed into the gantry robot on the same two parallel infeed lanes used by the unboxed bottles.
One bit of functionality on the gantry robot is best appreciated by viewing the video. On the shuttle mechanism that lifts the Design Boxes from the infeed conveyor and transports them to the place where the gantry robot can pick them, rotating platforms under each bottle orient the boxes so that fronts are facing the desired direction.
In handling the Design Boxes, the Cermex gantry robot operates in essentially the same fashion as it does when handling unboxed bottles. But the tooling is completely different. While unboxed bottles are gripped mechanically, Design Boxes are gripped by vacuum cups. And where unboxed bottles are tipped to a horizontal position and placed into corrugated trays, Design Boxes are tipped to a horizontal position and placed in the flights or brackets of the step-by-step bracket conveyor. In Figure D, where the Design Boxes are moving through the gantry robot from right to left, the 12 boxes suspended from their vacuum cup grippers have just been picked from the shuttle mechanism that’s partially visible in the foreground. These Design Boxes are about to be placed by the gantry robot in the bracket conveyor so they can advance to case packing. As soon as this task is complete, the gantry robot will pick the 12 boxes that are standing vertically, reorient them to a horizontal position, and place them in the bracket conveyor.
Immediately downstream from the gantry robot, it’s the case packer’s turn. At a fundamental level, it cycles in much the same way as it does when it’s packing unboxed bottles. But once again the tooling it uses is completely different. This is clearly illustrated in Figures E (showing the tooling used for packing corrugated trays into cases) and F (showing the vacuum cup tooling used for packing Design Boxes into cases).
End-of-arm tooling rocks
The end-of-arm tooling may be the cleverest aspect of the whole Cermex solution. Consider how different it is to case pack corrugated trays that hold bottles compared to picking elegant paperboard Design Boxes and putting them in cases. It’s the tooling that permits the robots to handle these significantly different formats. The tray erector, the gantry robot, and the wraparound case packer are all specifically designed to guarantee an average format changeover time of less than 20 minutes. And these changes are made automatically by selecting a new format at an HMI panel.
It’s not that operator involvement has been eliminated. But the amount of effort required from an operator is greatly minimized. Ergonomics, in other words, is optimized.
The use of storage racks that hold the end-of-arm tooling plays a key role. Some of these are shown in Figure G. The two racks on the right are on wheels because they’re relatively light and an operator can stop, start, and steer them with ease. The storage rack on the left, which holds the end-of-arm tooling used by the gantry robot to pick unboxed bottles and place them into corrugated trays, is too heavy for an operator to maneuver it safely, so the operator uses a hand truck to roll it into the enclosed working envelope of the gantry robot. Once it’s in place, the operator selects pre-programmed options from a menu and the robot does the rest automatically. That is, it uncouples the end-of-arm tooling it no longer needs and places it on a storage rack. It then attaches itself to the new tooling required for the next production run and, in short order, is ready to go. The operator completes the task by wheeling out the end-of-arm tooling that has just been removed from the robot.
Needless to say, little of the versatility or ease of changeover on display at VCP would have been possible in the absence of advanced controls technology. The gantry robot, for example, represents the first time Cermex has deployed Movidrive servo inverters from SEW Eurodrive.
“This is about as sophisticated as it gets in making motors move things around,” says Matt Murray of SEW Eurodrive. “Remember, all a motor does is spin. In this kinematic application, Cermex is getting motors to work together to create motion in 3D space. The really demanding motion control and interpolation tasks are performed by a MoviPLC, a card mounted either in one of our servo drives or mounted in the controls cabinet. That card does all the heavy lifting where calculation and interpolation are concerned, because all those programs are pre-written. That saved Cermex weeks of time spent writing software.
“What it means is that the gantry robot’s main PLC doesn’t have to concern itself with motion. It simply instructs the MoviPLC to run, and the MoviPLC, which is the equivalent of what today is commonly called a PAC or Programmable Automation Controller, takes care of all the complicated motion.”
It’s another example of the ongoing trend toward modularity that has reshaped so much of the packaging machinery we see today.
“The modularity in this case brings a bit benefit to the end user,” says SEW Eurodrive’s Rich Mintz. “If there’s a jam, or if there should be any need for troubleshooting of any kind, having these software programs decentralized and having each intelligent device doing its own special thing makes the end user’s job much easier. And if anything goes bad where motion control is concerned, it’s all stored inside the MoviPLC card, which is a lot like the memory card of a digital camera. This ability to replace controls components in modular pieces is exactly what a plant operator or plant technician wants. You want to keep that main PLC as small as possible. The more you can decentralize the controls and get portions of it out of the PLC, the better. That way, if something goes wrong with motion in the gantry packer, they snap out the MoviPLC card and snap in a new one rather than trying to interpret or troubleshoot 20,000 lines of code in a PLC.”
Redundancy’s role
Exiting the robotic case packing station, cases are conveyed past four labeling applicators; integrated into each labeler is a Zebra thermal-transfer print engine. Only two labelers are in operation at any one time, one that applies a bar-code label and the other that applies product name and champagne variety. But having two redundant labelers in place greatly reduces changeover times because new label material can be mounted and ready to go while the previous run is still in production. Label presence and quality are checked by a Cognex vision system.
A spiral conveyor from Ambaflex now takes cases up to the overhead level where palletizing takes place. Cermex describes its P4 palletizer as a new innovative and patented system for pre-stacking 2 or 3 complete layers prior to transferring those layers onto the pallet. This permits the machine to achieve a maximum speed of 8.5 layers/min with no increase in footprint. The P4 palletizer also has a highly compact and servo-driven case turning feature at its infeed section.
According to Fabien Gaudard, R&D Manager at VCP, the new line has made a huge contribution in keeping VCP as innovative, competitive, and productive as possible. “Maximizing efficiency is essential, he points out. “And besides, by automating the operation to the extent we have, we feel we can maintain higher standards of quality and appearance in the packages that reach our global markets.”